Por cuestiones de trabajo suelo ausentarme de mi casa y a pesar de tener sistemas de cámaras uno no siempre esta viendo el móvil para saber que esta pasando es por eso que se me ocurrió un pequeño sistema que conectado a las puertas de acceso me envía un mensaje por Telegram avisando de que tal puerta se ha abierto o cerrado. El sistema tiene ademas una interfaz web para cambiar la configuración por ejemplo la red Wi-Fi o las credenciales Telegram, para esto un pequeño botón que al ser accionado borra el archivo de configuración y envía un reset a la placa que inicia en modo setup. Desde luego que para todo esto tenemos que tener instalado en el móvil la aplicación de Telegram. Lo primero que hacemos es crear un grupo dentro de Telegram y luego mediante el BotFather creamos un bot que agregamos al grupo creado.
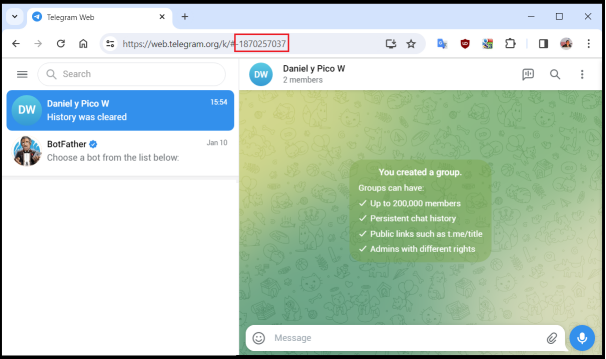
El proceso de crear un bot es muy sencillo y la propia aplicación te guía de como hacerlo con el comando /newbot. Pero lo importante aquí es el Token, algo parecido a esto 123456:ABC-DEF1234ghIkl-zyx57W2v1u123ew11 este será el ID del bot y lo necesitará para configurar el acceso y poder enviar mensajes al bot. Lo siguiente es obtener el ID del usuario, es importante que este bot este agregado al grupo, luego desde un computador enviamos un mensaje al bot y tomamos nota del número ID que aparece en la barra del navegador. Observe la siguiente imagen donde se puede ver el nombre de mi bot y el ID correspondiente (no olvide el signo menos).
Tenemos los datos necesarios para conectar con Telegram y el bot, ahora solo necesitamos un programa en Pico W que haga el trabajo. La aplicación que construí puede funcionar de dos formas.
Modo Usuario: Controla el estado de las puertas asignadas.
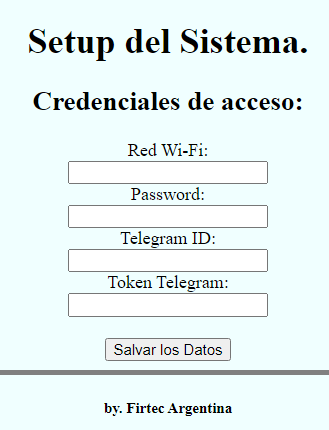
Modo Programación: El sistema crea una red Wi-Fi propia abierta con el SSID firadmin. En esa red se accede http://firtec.net que básicamente es una página de configuración donde se cargan las credenciales de acceso tanto a la red Wi-Fi adonde se conectará Pico W como las credenciales de acceso a Telegram.
En la siguiente imagen se puede ver el aspecto de la página web de configuración para el sistema.
Una vez que los datos son salvados la red firadmin desaparece y el sistema pasa al modo usuario intentando validar las credenciales de acceso a la red Wi-Fi y cuando sea necesario las credenciales de Telegram. Para entrar al modo programación se ha colocado un pequeño pulsador en el GPIO_16 que si se oprime el sistema se desconecta de la red Wi-Fi, borra todas las credenciales y pasa a modo programación. Para detectar la actividad de las puertas se usaron sensores magnéticos que activan una interrupción por cambio de estado en el GPIO_11.
defISR_11(p):globalbanderaglobalenviadoif(sensor.value()==0):bandera=2led_azul.value(1)if(sensor.value()==1):bandera=1enviado=0led_azul.value(1)if(bandera==1andenviado==0):send_message(wifi_credentials['telegramDmUid'],text_1)enviado=1wdt.feed()# Borra el WD print("Puerta de calle Abierta!!")if(bandera==2andenviado==1):wdt.feed()# Borra el WD send_message(wifi_credentials['telegramDmUid'],text_2)print("Puerta de calle Cerrada!!")enviado=3
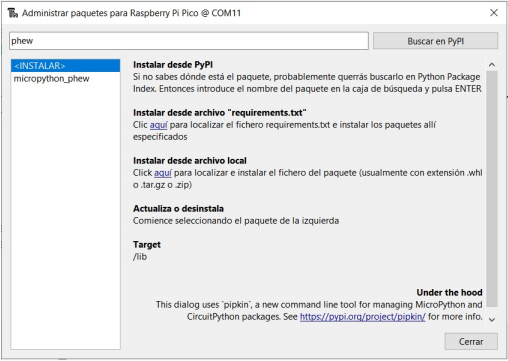
Para el servidor web y todo lo referente a los procesos web usaremos el módulo phew.
Módulo phew.
Es un pequeño servidor web y una biblioteca de plantillas ya diseñadas específicamente para Micropython en Pico W. Su objetivo es proporcionar un juego de herramientas completo para crear fácilmente interfaces basadas en la web de alta calidad para todos los proyectos que requieran soporte web. Es un módulo ideal para crear interfaces de configuración basadas páginas web embebidas que se conectan con sistemas electrónicos.
Que podemos hacer con phew:
Un servidor web básico optimizado para la velocidad y recursos de pico w.
Uso mínimo de los recursos de memoria y CPU.
Motor de plantilla que permite expresiones de Python en línea con los métodos Get y Post.
Soporte de conexión Wi-Fi.
Como en ejemplos anteriores lo instalamos en la memoria de pico w usando el administrador de paquetes de Thonny.
Como trabaja el ejemplo propuesto.
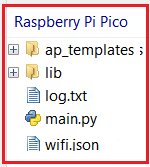
Cuando el sistema ha sido configurado crea un archivo que en mi caso he llamado wifi.json y dentro de este archivo encontramos los siguientes datos.
Estos datos son las credenciales de acceso tanto a la red Wi-Fi como al bot de Telegram. Este archivo será borrado automáticamente si se oprime el botón de programación cuando el sistema pasa a modo programación y es por eso que cuando el sistema inicia la primer tarea es verificar que este archivo está en memoria, si no lo encuentra pasa automáticamente al modo programación. La presencia de este archivo determina en que modo arranca el sistema. Continuando con el encabezado del programa podemos ver las declaraciones de las variables usadas como el son el punto de acceso que se crea cuando el sistema es programado, el nombre del dominio para acceder a la página de programación etc.
text_1='Puerta de calle abierta!!!'text_2='Puerta de calle cerrada!!!'AP_NAME="firadmin"# Nombre del punto de accesoAP_DOMAIN="firtec.net"# Nombre del dominioAP_TEMPLATE_PATH="ap_templates"# Carpetas sitios htmlAPP_TEMPLATE_PATH="app_templates"# Carpetas sitios htmlWIFI_FILE="wifi.json"#Donde se guardan las credencialesLOG_FILE="log.txt"WIFI_MAX_ATTEMPTS=3bandera=0enviado=0sensor=Pin(11,Pin.IN,Pin.PULL_UP)boton=Pin(16,Pin.IN,Pin.PULL_UP)
Se han colocado unos indicadores LED´s para conocer el estado operativo del sistema. En este caso el indicador verde indica que el sistema está conectado a la red Wi-Fi y el indicador rojo indica que el sistema está en modo programación.
El código completo de la aplicación es el siguiente.
fromphewimportaccess_point,connect_to_wifi,is_connected_to_wifi,dns,serverfromphew.templateimportrender_templateimportjsonimportmachineimportosimportutimeimport_threadimportustructasstructfrommachineimportPinfrommachineimportWDTimportrp2importnetworkimportubinasciiimporturequestsasrequestsimporttimewlan=network.WLAN(network.STA_IF)wlan.active(True)wdt=''led_rojo=Pin(22,Pin.OUT)led_rojo.value(0)red_ok=Pin(21,Pin.OUT)red_ok.value(0)led_azul=Pin(20,Pin.OUT)led_azul.value(0)text_1='Puerta del Quincho Abierta!!!'text_2='Puerta del Quincho Cerrada!!!'AP_NAME="firadmin"#Nombre del punto de accesoAP_DOMAIN="firtec.net"#Nombre del dominioAP_TEMPLATE_PATH="ap_templates"APP_TEMPLATE_PATH="app_templates"WIFI_FILE="wifi.json"#Donde se guardan las credencialesLOG_FILE="log.txt"WIFI_MAX_ATTEMPTS=3bandera=0enviado=0sensor=Pin(11,Pin.IN,Pin.PULL_UP)boton=Pin(16,Pin.IN,Pin.PULL_UP)defISR_11(p):globalbanderaglobalenviadoif(sensor.value()==0):bandera=2led_azul.value(1)if(sensor.value()==1):bandera=1enviado=0led_azul.value(1)if(bandera==1andenviado==0):send_message(wifi_credentials['telegramDmUid'],text_1)enviado=1wdt.feed()print("Puerta de calle Abierta!!")if(bandera==2andenviado==1):wdt.feed()send_message(wifi_credentials['telegramDmUid'],text_2)print("Puerta de calle Cerrada!!")enviado=3sensor.irq(trigger=Pin.IRQ_RISING|Pin.IRQ_FALLING,handler=ISR_11)defmachine_reset():utime.sleep(1)print("Reseteando sistema...")machine.reset()defborrar():# Borrar el archivo de configuracion y hacer un reboot# como acces point.os.remove(WIFI_FILE)# Reboot en un hilo nuevo_thread.start_new_thread(machine_reset,())red_ok.value(0)defsetup_mode():led_rojo.value(1)red_ok.value(0)print("Entra al modo setup...")defap_index(request):ifrequest.headers.get("host").lower()!=AP_DOMAIN.lower():wdt.feed()# Borra el WD returnrender_template(f"{AP_TEMPLATE_PATH}/redirect.html",domain=AP_DOMAIN.lower())returnrender_template(f"{AP_TEMPLATE_PATH}/index.html")defap_configure(request):print("Salvando las credenciales del wifi...")withopen(WIFI_FILE,"w")asf:json.dump(request.form,f)f.close()# Reboot en un hilo nuevo_thread.start_new_thread(machine_reset,())returnrender_template(f"{AP_TEMPLATE_PATH}/configured.html",ssid=request.form["ssid"])defap_catch_all(request):ifrequest.headers.get("host")!=AP_DOMAIN:returnrender_template(f"{AP_TEMPLATE_PATH}/redirect.html",domain=AP_DOMAIN)return"Not found.",404server.add_route("/",handler=ap_index,methods=["GET"])server.add_route("/configure",handler=ap_configure,methods=["POST"])server.set_callback(ap_catch_all)ap=access_point(AP_NAME)ip=ap.ifconfig()[0]dns.run_catchall(ip)#-------- Envía el mensaje a Telegram ---------------defsend_message(chatId,message):wdt.feed()# Borra el WD -------response=requests.post(sendURL+"?chat_id="+wifi_credentials['telegramDmUid']+"&text="+message)print('Mensaje Enviado')wdt.feed()# Borra el WD -------response.close()# IMPORTANTE!! Cerrar para no desbordar la RAMdefapplication_mode():globalwdtled_azul.value(0)wdt=WDT(timeout=8000)# Habilita el watchdog para 8 Segundoswdt.feed()# Borra el WD led_rojo.value(0)globalsendURLsendURL='https://api.telegram.org/bot'+wifi_credentials['botToken']+'/sendMessage'print("Entrando en modo aplicacion.")whileTrue:wdt.feed()# Borra el WD led_azul.value(0)if(boton.value()==0):borrar()# En que modo debe iniciar...try:os.stat(WIFI_FILE)withopen(WIFI_FILE)asf:wifi_current_attempt=1wifi_credentials=json.load(f)while(wifi_current_attempt<WIFI_MAX_ATTEMPTS):ip_address=connect_to_wifi(wifi_credentials["ssid"],wifi_credentials["password"])ifis_connected_to_wifi():print(f"Conectado con la IP {ip_address}")breakelse:wifi_current_attempt+=1ifis_connected_to_wifi():red_ok.value(1)application_mode()else:print("ERROR!")print(wifi_credentials)#os.remove(WIFI_FILE) # Esta linea hace que pase al setup si falla wifi habilitar si # queremos que esto pase, machine_reset()exceptException:setup_mode()server.run()
El archivo index.html tiene el siguiente contenido.
<!DOCTYPE html><html><metacharset="UTF-8"><bodystyle=background:#F0FFFF><FONTCOLOR="black"><center><head><metaname="viewport"content="width=device-width, initial-scale=1"><title>SETUP</title></head><body><h1>Setup del Sistema.</h1><h2>Credenciales de acceso:</h2><formaction="/configure"method="POST"autocomplete="off"autocapitalize="none"><labelfor="ssid">Red Wi-Fi:</label><br><inputtype="text"id="ssid"name="ssid"><br><labelfor="password">Password:</label><br><inputtype="text"id="password"name="password"><br><labelfor="telegramDmUid">Telegram ID:</label><br><inputtype="text"id="telegramDmUid"name="telegramDmUid"><br><labelfor="botToken">Token Telegram:</label><br><inputtype="text"id="botToken"name="botToken"><br><br><button>Salvar los Datos</button><hrSize=5noshade/><H5><fontcolor='black'>by. Firtec Argentina </H5></form></body></center></html>
En la carpeta ap_templates también vamos a necesitar el archivo configured.py que tiene el siguiente contenido.
<!DOCTYPE html><html><head><metaname="viewport"content="width=device-width, initial-scale=1.0"><title>Wifi Configured</title></head><body><h1>Wifi Configured</h1><p>The Raspberry Pi Pico will now reboot and attempt to connect to the "{{ssid}}"wireless network...</p></body></html>
También el archivo redirect.html con el contenido.
Recuerde que en wifi_credentials se encuentran las credenciales de acceso tanto para el Wi-Fi como para Telegram. Cuando el mensaje se envía se extraen las credenciales de la siguiente forma send_message(wifi_credentials['telegramDmUid'], text_1) por ejemplo para el primer mensaje. El método que envía el mensaje es bastante simple y también lee el Token Telegram desde el archivo de credenciales. En la siguiente imagen se puede ver la estructura de archivos que debe contener el proyecto.
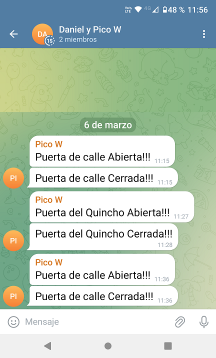
En lo personal he editado la biblioteca para eliminar la creación del archivo log.txt que eventualmente podría crecer demasiado con el tiempo y ocupar mucha memoria. Una vez que el sistema esta funcionado los mensajes enviados tienen el siguiente aspecto.
Todo el sistema lleva funcionando mas de un año en distintas puertas sin problemas enviando mensajes a mi móvil. Si tiene alguna duda puede consultarnos en Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.. Este y otros muchos ejemplos se encuentran en nuestro libro "Electrónica con MicroPython".
Si usted esta programando PIC, ATMEL, ARDUINO en lenguaje C sin duda es momento de investigar un poco sobre MicroPython. El continuo avance en el hardware de los microcontroladores hace que la línea que los separa de los microprocesadores sea cada vez mas borrosa. Al tener microcontroladores mas rápidos y con capacidad para gestionar mucha mas memoria ahora es posible correr programas que son derivaciones directas de los entornos informáticos. Es el caso de MicroPython, una derivación de lenguaje Python 3 escrita en C. MicroPython es un compilador completo del lenguaje Python y un motor e intérprete en tiempo de ejecución, que funciona en el hardware del microcontrolador. Incluye una selección de bibliotecas y módulos que permiten al programador el acceso completo al hardware en bajo nivel.
MicroPython lo creó originalmente el programador y físico australiano Damien George y soporta un amplio número de arquitecturas basadas en ARM, siendo de código libre y actualizado constantemente, en la actualidad es una de las herramientas de programación que se perfila como de gran desarrollo y uso común en el futuro inmediato.
Con MicroPyton tenemos el control de la electrónica que ofrece C pero con el agregado de las bibliotecas y módulos de Python 3. Otra gran ventaja es que al ser un lenguaje interpretado no se necesita de un compilador y un sistema operativo especifico, tampoco necesitamos licencias de programas. Podemos escribir un código completo en un editor de texto plano, tomar el archivo escrito agregarle la extensión py y simplemente transferirlo a la memoria del microcontrolador, con esto tendremos el controlador programado y funcionando.
Esto suena bien pero puedo hacer esto con cualquier microcontrolador? La respuesta es NO, para poder usar MicroPython necesitamos un microcontrolador con una arquitectura que permita manejar archivos. Esto es un microcontrolador rápido y con capacidad para gestionar grandes cantidades de memoria RAM y FLASH. Es necesario cargar en esta memoria el propio interprete MicroPython, es decir que antes de que el microcontrolador ejecute el código que el programador a escrito el interprete debe estar en memoria para poder “traducir” lo que el programador a escrito a un nivel entendible por la propia CPU del controlador.
Tenemos en la actualidad opciones como el microcontrolador RP2040 que viene ya montado en placas Arduino y Raspberry Pico entre otras. Si compara el costo de una Raspberry Pico con un Arduino UNO, verá que es mucho mas conveniente usar Raspberry Pico. El controlador RP2040 tiene a bordo dos CPU ARM Cortex M0 trabajando a 133 Mhz, 264 KB de memoria RAM y 2 MB de memoria FLASH, puertos I2C, SPI, UART, etc. Como se puede ver hay una gran diferencia con un Arduino UNO. Una de las criticas que se suele escuchar sobre MicroPython es que al ser un lenguaje interpretado el código escrito por el programador esta en texto plano lo que hace que sea sencillo copiarlo o duplicarlo pero podríamos tomar un trozo del código y encriptarlo en una memoria exterior de tal forma que si alguien copia el programa principal tendrá también que reescribir los métodos encriptados para que todo funcione. Otra forma de proteger el código sería compilar y generar un archivo uf2 y descargar este archivo en la memoria de Pico, esto no solo ofrece una protección ante la copia del código, también mejora la velocidad de ejecución ya que al ser MicroPython un lenguaje interpretado para que el código llegue a ejecutarse en la CPU se necesitan algunos pasos extra si lo comparamos con un código compilado donde el interprete ya no es necesario.
Sin embargo con estos nuevos microcontroladores como el RP2040 tenemos el control y manejo de sensores y electrónica que tendríamos con un Arduino, PIC, Atmel, etc pero al ser MicroPython un lenguaje mas limpio es mucho mas sencillo de aprender lo que significa tiempos de aprendizaje y estudio mucho mas cortos. Si necesitamos conectividad TCP-IP, algo absolutamente necesario si vamos a trabajar en plataformas de IOT, entonces tenemos Pico W que suma a lo anterior un enlace WiFi muy simple de usar. Con Pico W tenemos la posibilidad de desarrollar aplicaciones con páginas web embebidas. El poder desarrollar este tipo de aplicaciones son muy interesantes puesto que no necesitamos de costosas pantallas gráficas para desplegar información, la pantalla gráfica la tiene el cliente con su móvil, tableta o computadora además de poder acceder al dispositivo desde cualquier lugar del mundo. Se podría por ejemplo acceder a variables de campo mediante un microcontrolador RP2040 consultando el estado de sensores y actividad de terreno para publicar los datos en la red mediante su propio enlace WiFi. Con estos nuevos microcontroladores y MicroPython el desarrollar sistemas de enlaces TCP-IP, bases de datos, control de casas inteligentes o sistemas domóticos es ahora mucho mas sencillo y sobre todo económico. Todos estos temas y muchos otros los encontrará explicados en nuestro libro "Electrónica con MicroPython".
Puede consultarnos en Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
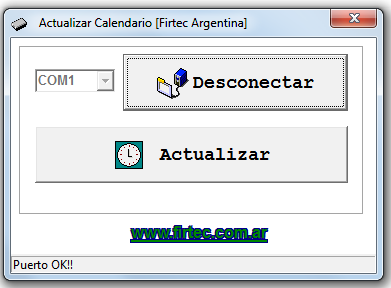
Las pantallas Nextion serie K o mejoradas incorporan no solo mas memoria FLASH, también EEPROM y un reloj calendario. Tener un calendario en la propia pantalla es muy útil porque evita tener que agregarlo en la propia electrónica . En el siguiente ejemplo vemos un Raspberry Pico conectado a una pantalla Nextión mas dos botones. Uno de estos botones se conecta al GPIO15 y el otro a RUN, para ajustar el calendario solo debemos apretar los dos botones, soltar RUN y luego GPIO15. El programa pasa a una rutina que espera recibir los datos desde una aplicación diseñada para esa tarea, cuando el RTC está correctamente configurado el LED de la propia placa se enciende indicando que podemos volver a presiona RUN (solo RUN) y el programa continua normalmente con los nuevos datos del calendario.
La pantalla envía cada segundo los datos del RTC a los que se les da el formato dd/mm/aa/ y el reloj hh:mm:ss, estos datos son enviados a la pantalla y se muestran en dos objetos del tipo texto. (El formato se puede ver en el siguiente vídeo).
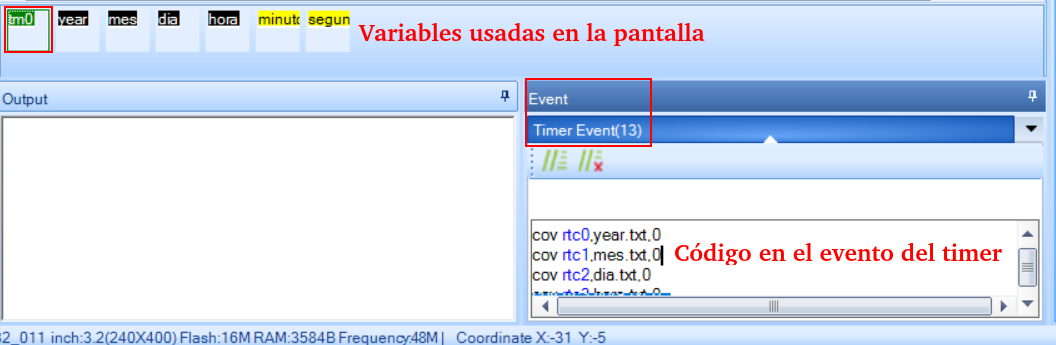
Para que esto funcione será necesario escribir unas líneas de código en IDE de Nextion, necesitamos de un Timer un conjunto de variables que serán las encargadas de hacer llegar la información a PICO al ritmo de un segundo cada vez. El el evento del Timer escribimos el siguiente código (esto se escribe en el IDE de Nextion). El comando cov pasa un dato a una variable en el campo seleccionado, txt en este caso. El comando get envía los datos por la UART de la pantalla a 9600 baudios que es la velocidad por defecto. Desde el sitio de Nextion se puede descargar el set de instrucciones y comandos.
Aparte del Timer necesitamos una serie de variables que usaremos para enviar los datos desde la pantalla a PICO. Importante 1: Todas estas variables deben ser ajustadas como globales, por defecto son locales y no pueden ser accedidas desde afuera de la propia ventana o pantalla. Importante 2: El Timer debe ser disparado de nuevo cada vez que su tiempo termine de lo contrario solo se ejecuta una vez.
Como se explico en otro ejemplo, los mensajes Nextion siempre terminan con 0xFF 0xFF 0xFF y el aspecto de un mensaje enviando los datos del RTC es elsiguiente.
De acuerdo al código escrito en el evento del Timer primero envía el año luego el mes, día, hora, minutos y segundos pero lo interesante es que antes de cada dato se envía una "p" que será muy útil a la hora de recuperar los datos. No podemos simplemente contar los casilleros de la cadena porque su longitud varía si los datos tiene un dígito o dos, entonce sabiendo que luego de la "p" está el dato solo es cuestión de usar ese carácter como marcador. El único dato que siempre estará en la misma posición ocupando la misma cantidad de casilleros es el año pero el resto puede variar dependiendo de que tengan uno o dos dígitos. Supongamos que los datos vienen en la variable mensaje observe el siguiente código:
Usando index() recorremos el mensaje usando el offset obtenido en "a" y recorremos la cadena hasta el primer marcador que esta antes del año, el segundo marcador esta antes del mes pero necesitamos saber si el mes tiene uno o dos dígitos para eso evaluamos el valor del primer casillero y del que le sigue si contiene información numérica válida, con join() concatenamos los dos caracteres en la variable _mes. Si no hay información numérica válida en el segundo casillero significa que el dato solo tiene un dígito. Una vez que tenemos todos los datos simplemente se arma una cadena para calendario agregando el separador "/".
calendario = "/".join((_dia,_mes,_year))
Y lo mismo para el reloj con el separador ":".
reloj = ":".join((_hora,_minutos,_segundos))
Luego solo resta enviar las dos cadenas a la pantalla y mostrar la información en dos objetos del tipo Texto. enviar("t1.txt=\""+ calendario +"\"") enviar("t2.txt=\""+ reloj +"\"") El código completo del ejemplo es el siguiente.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
#.................................................................................# El ejemplo requiere de dos botones conectados a RUN y GPIO15.# Si ambos botones son activados el programa espera recibir datos del soft# de ajuste para el RTC. El LED de la placa Raspberry PICO se encenderá para# indicar que el reloj ha sido configurado.# Luego oprimir solamente el boton RUN y el sistema queda fucionando con los# nuevos datos.# Software de ajuste: https://www.firtec.com.ar/Python/rtc.zip# La información del RTC es tratada y retorna a la pantalla con el formato# dd/hh/yy hh:mm:ss y se muestra en dos objetos tipo texto.## Target: RASPBERRY PICO# ToolChain: MICROPYTHON## www.firtec.ar - Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.#.................................................................................frommachineimportUART,Pinfromrp2importPIO,StateMachine,asm_pioimporttimeimportosBAUDIOS=9600HARD_UART_TX_PIN=Pin(4,Pin.OUT)PIO_RX_PIN=Pin(3,Pin.IN,Pin.PULL_UP)boton=Pin(15,Pin.IN,Pin.PULL_UP)# Botón para el modo ajuste.@asm_pio(in_shiftdir=rp2.PIO.SHIFT_RIGHT,)defuart_rx():label("inicio")wait(0,pin,0)# Espera por el bit de inicio (pin a nivel bajo el tiempo de un bit)# Carga el registro x con la cantidad de bits desde el primer bit de datos y espera# 10 cilos + wait + set 12 ciclos. (12*13uS = 156uS)set(x,7)[10]label("bit_bucle")in_(pins,1)# Desplaza un bit desde el pin 3 RX al registro de desplazamiento# Cada bucle toma 8 ciclos, 6 + dec + jmp = 8 (8*13uS = 104uS)jmp(x_dec,"bit_bucle")[6]jmp(pin,"terminado")# Si el pin esta a nivel alto llegó el bit de STOPirq(block,4)# Coloca bandera para informar el error.wait(1,pin,0)# Espera que el pin de datos este bajojmp("inicio")# No hacer nada y volver al inicio porque a ocurrido un errorlabel("terminado")# Todo ha salido bien y se ha recibido un caracter!!push(block)deferror(sm):print("ERROR de tiempo",end="!!!")defajustar():whileTrue:globalcontrx=sm.get()>>24ifcont==0:a=rxelifcont==1:enviar("rtc1="+str(rx))elifcont==2:enviar("rtc2="+str(rx))elifcont==3:enviar("rtc3="+str(rx))elifcont==4:enviar("rtc4="+str(rx))elifcont==5:enviar("rtc5="+str(rx))cont+=1ifcont==6:cont=0led.value(1)# LED indicador de carga de datos finalizadasm=StateMachine(0,uart_rx,# Programa que se carga en la maquinafreq=8*BAUDIOS,# Frecuencia de reloj 8*9600=76800 Hz(13uS)in_base=PIO_RX_PIN,# Define el pin de entrada al registro de desplazamientojmp_pin=PIO_RX_PIN,# Cuando este pin este a nivel alto saltar)sm.irq(error)sm.active(1)cont=0uart=UART(0,baudrate=9600,tx=Pin(0),rx=Pin(1),timeout=10)led=Pin(25,Pin.OUT)led.value(0)# Variables usadas en el ejemplobandera=0_year=0_mes=0_dia=0_hora=0_minutos=0_segundos=0defenviar(cmd):uart.write(cmd)uart.write(b'\xFF\xFF\xFF')defmain():if(boton.value()==0):ajustar()whileTrue:whileuart.any():# Recibe los datos desde la pantalla Nextionled.toggle()datos_nextion=uart.readline()mensaje=str(datos_nextion)global_year_year="".join((mensaje[3],mensaje[4],mensaje[5],mensaje[6]))a=mensaje.index("p")a=mensaje.index("p",a+1)global_mesif(mensaje[a+1]>="0"ormensaje[a+2]<="9"):_mes="".join((mensaje[a+1],mensaje[a+2]))if(mensaje[a+2]>"9"):_mes=mensaje[a+1]global_diaa=mensaje.index("p",a+1)if(mensaje[a+1]>="0"ormensaje[a+2]<="9"):_dia="".join((mensaje[a+1],mensaje[a+2]))if(mensaje[a+2]>"9"):_dia=mensaje[a+1]global_horaa=mensaje.index("p",a+1)if(mensaje[a+1]>="0"ormensaje[a+2]<="9"):_hora="".join((mensaje[a+1],mensaje[a+2]))if(mensaje[a+2]>"9"):_hora=mensaje[a+1]global_minutosa=mensaje.index("p",a+1)if(mensaje[a+1]>="0"ormensaje[a+2]<="9"):_minutos="".join((mensaje[a+1],mensaje[a+2]))if(mensaje[a+2]>"9"):_minutos=mensaje[a+1]global_segundosa=mensaje.index("p",a+1)if(mensaje[a+1]>="0"ormensaje[a+2]<="9"):_segundos="".join((mensaje[a+1],mensaje[a+2]))if(mensaje[a+2]>"9"):_segundos=mensaje[a+1]calendario="/".join((_dia,_mes,_year))reloj=":".join((_hora,_minutos,_segundos))enviar("t1.txt=\""+calendario+"\"")enviar("t2.txt=\""+reloj+"\"")if__name__=='__main__':main()
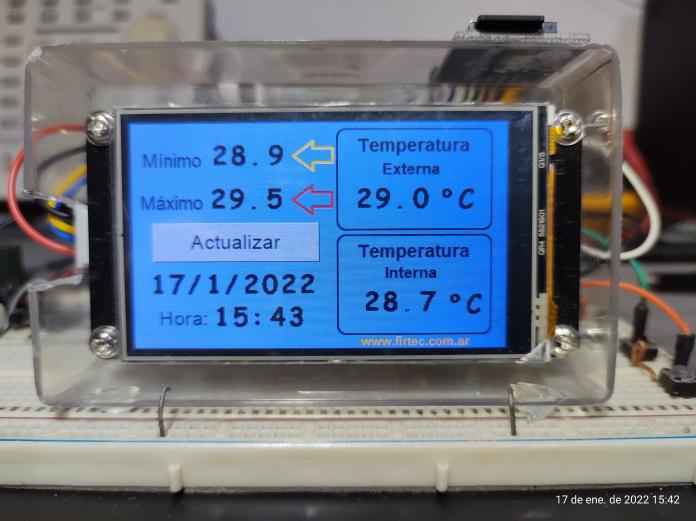
Para el receptor serial que recibe los datos de la aplicación de ajuste se ha usado código ensamblador PIO del controlador RP2040 y controlado por una interrupción. Como se puede ver el uso de pantallas gráficas no solo se limita a detectar botones y desplegar datos, también podemos escribir programas completos dentro de la propia pantalla para relacionarla con la electrónica a la que está conectada. Por ejemplo podemos construir un datalogger para registrar y almacenar la temperatura en una memoria SD.
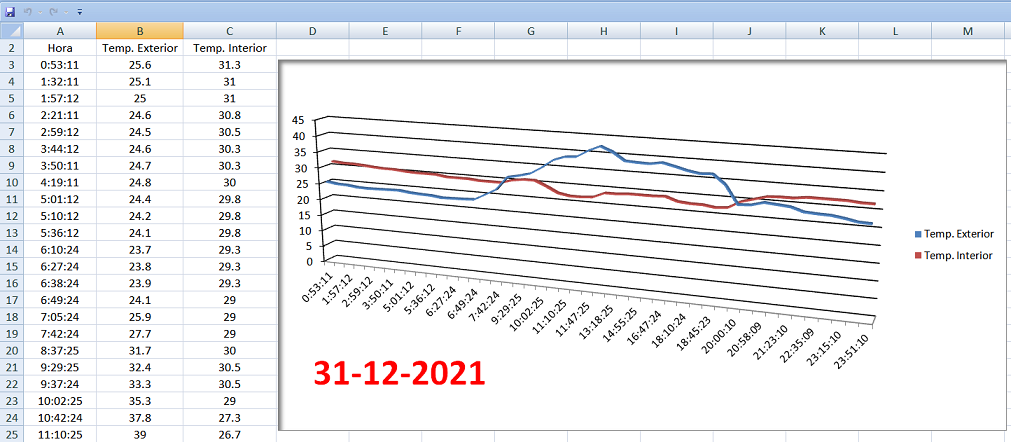
El ejemplo crea una carpeta en la memoria SD cada nuevo mes con el nombre del mes y año, luego cada día crea un archivo que lleva por nombre la fecha del día y transcurrido un tiempo aleatorio que va desde 1 a 59 minutos almacena los datos de temperatura y hora de la muestra con un formato de hoja de cálculo.
El botón actualizar que se ve en la imagen tiene la función de actualizar los mínimos y máximos, sin embargo en este ejemplo la función principal es poder mostrar como se discriminan los distintos mensajes que llegan desde y hacia la pantalla. El texto ha sido extraído de uno de nuestros libros "ELECTRÓNICA CON MICROPYHTON"
En los cultivos hidropónicos independientemente del sistema que se elija (NFT, Mixto, etc) el control de la bomba para la solución nutritiva es de vital importancia. En el siguiente ejemplo tenemos un Arduino Nano controlando el tiempo de apagado y funcionamiento de una bomba que impulsa los nutrientes por los tubos del sistema hidropónico.
El sistema propuesto puede temporizar tanto el tiempo de funcionamiento como el de apagado en un rango que va desde 1 a 50 minutos. También tiene arranque y parada manual de la bomba y la visualización de temperatura de la solución nutritiva mediante un sensor DS18B20. Las variables ambientales se obtienen con un sensor DHT22. El sistema almacena en memoria EEPROM los datos de tiempos de funcionamiento por lo que si todo el sistema se apaga, al encenderlo nuevamente el controlador retoma su tarea con los tiempos previstos. El código completo para obtener los resultados como los mostrados en la imagen es el siguiente:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
/********************************************************************* Descripción: Control de un sistema de bomba para hidroponia con** lectura de temperatura de la solución nutritiva y** condiciones ambientales como temperatura y humedad** Sensor DS18B20 conectado en pin 10 y DHT22 en pin 9** Botones de arranque/parada manual conectados en pines ** 3 y 4. ** Boton de programación de tiempos en pin 2** Placa Arduino: NANO** Arduino IDE: 1.8.15** ** www.firtec.com.ar*******************************************************************/#include <DHT.h>#define DHTTYPE DHT22 // Tipo de sensor#include <EEPROM.h>#include <LiquidCrystal_I2C.h>#include <OneWire.h>#include <avr/wdt.h>#include <DallasTemperature.h>voidTemperatura_Nutriente(void);// Función para medir la temperatura voidProgramar_Tiempo(void);// Función para los tiempos de la bombavoidPotenciometro(void);// Función para ajustar los minutos de trabajovoidPantalla(void);// Función para mostrar los textos en pantallavoidSensor_DHT22(void);// Lee temperatura y humedad ambienteLiquidCrystal_I2Clcd(0x27,20,4);#define prog 2 // Boton de programacion para el tiempo de bomba#define arranque_manual 3 // Boton para el arranque manual de la bomba#define parada_manual 4 // Boton para la parada manual de la bomba#define relay_bomba 5 // Salida para activar/desactivar bomba de nutrientes#define alarma_temperatura 18 // LED para indicar alarma de temperatura#define calefactor 17 // Pin para activar/desactivar el calefactor OneWireUnWire(10);// Sensor DS18B20 conectado en el pin 10DallasTemperaturesensor(&UnWire);DHTdht(9,DHT22);// Instancia del sensor conectado en el pin 9byteminutos=0,segundos=0,estado=0;bytetiempo_boton=0;// Tiempo de espera para entrar en modo programacionbytetiempo_funcionamiento=10;// Valor por defecto si no hay nada previobytetiempo_apagado=10;// Valor por defecto si no hay nada previocharbuffer[5]=" ";// Manejo de datos a ASCII para el LCDunsignedintM0=0;// Variable usada en el conversorvolatileboolflag_bomba=false;// Variable para avisar que ha pasado un segundoboolestado_bomba=false;boolflag_prog=false;boolprogramando=false;unsignedintdir_ep=0;// Variable para contener la dirección EEPROM donde se guarda los valoresdoubletemp;// Variable para contener la temperaturafloatt;floath;staticcharTemperatura[5]="";staticcharHumedad[5]="";/******************* FUNCIÓN PARA ESCALAR EL CONVERSOR A/D ********************** Potenciometro conectado en el Canal A0******************************************************************************/longmap(longx,longin_min,longin_max,longout_min,longout_max){return(x-in_min)*(out_max-out_min)/(in_max-in_min)+out_min;}/******************* FUNCIÓN DE CONFIGURACIÓN GENERAL ************************** Configura las condiciones de arranque y Hardware.******************************************************************************/voidsetup(){Serial.begin(9600);pinMode(A0,INPUT);pinMode(alarma_temperatura,OUTPUT);digitalWrite(alarma_temperatura,LOW);pinMode(calefactor,OUTPUT);// Pin para activar/desactivar el calefactor digitalWrite(calefactor,LOW);// Pin normal//digitalWrite(calefactor, HIGH); // Pin invertidopinMode(relay_bomba,OUTPUT);digitalWrite(relay_bomba,LOW);// Pin normal//digitalWrite(relay_bomba, HIGH); // Pin invertidopinMode(prog,INPUT_PULLUP);pinMode(arranque_manual,INPUT_PULLUP);// Configura el pin de arranque manual de la bombapinMode(parada_manual,INPUT_PULLUP);// Configura el pin de parada manual de la bombanoInterrupts();TCCR1A=0;// El registro de control A queda todo en 0TCCR1B=0;//limpia registradorTCNT1=0;//Inicializa el temporizadorOCR1A=0x3D09;// Carga el registrador de comparación: 16MHz/1024/1Hz = 15625 = 0X3D09TCCR1B|=(1<<WGM12)|(1<<CS10)|(1<<CS12);// modo CTC, prescaler de 1024: CS12 = 1 e CS10 = 1 TIMSK1|=(1<<OCIE1A);// habilita interrupción por igualdade de comparaciónTIMSK1|=(1<<TOIE1);// enable timer overflow interruptinterrupts();// enable all interruptsif(EEPROM.read(dir_ep)>50){// Recupera de memoria el ultimo tiempo de encendidotiempo_funcionamiento=10;// Si no es valido asigna uno por defecto 10 minutos}elsetiempo_funcionamiento=EEPROM.read(dir_ep);if(EEPROM.read(dir_ep+1)>50){// Recupera de memoria el ultimo tiempo de paradatiempo_apagado=10;// Si no es valido asigna uno por defecto 10 minutos}elsetiempo_apagado=EEPROM.read(dir_ep+1);lcd.init();lcd.backlight();dht.begin();Pantalla();wdt_disable();wdt_enable(WDTO_4S);}/******************* BUCLE PRINCIPAL DE PROGRAMA ******************************* Verifica botones, sensor de temperatura y control general del programa.******************************************************************************/voidloop(){wdt_reset();// Borra el contador del wachdogSensor_DHT22();//********* VERIFICA LOS BOTONES DE CONTROL MANUAL DE BOMBA*********************** if(digitalRead(arranque_manual)==LOW&programando==false){segundos=0;minutos=0;// Borrar minutos para nueva cuentadigitalWrite(relay_bomba,HIGH);// Activar la bomba de nutrientes (normal)//digitalWrite(relay_bomba, LOW); // Activar la bomba de nutrientes (invertido)estado_bomba=true;// Avisar que la bomba esta funcionandolcd.setCursor(6,2);if(programando==false)lcd.print("SI");// Mostrar cartel del estado de la bomba}if(digitalRead(parada_manual)==LOW&programando==false){segundos=0;minutos=0;// Borrar minutos para nueva cuentadigitalWrite(relay_bomba,LOW);// Activar la bomba de nutrientes (normal)//digitalWrite(relay_bomba, HIGH); // Activar la bomba de nutrientes (invertido)estado_bomba=false;// Avisar que la bomba esta funcionandolcd.setCursor(6,2);if(programando==false)lcd.print("NO");// Mostrar cartel del estado de la bomba}if(programando==false)Temperatura_Nutriente();// Mide la temperatura de solución de nutrienteswdt_reset();// Borra el contador del wachdog//********* CONTROL DE LA BOMBA DE NUTRIENTES **************************** if(flag_bomba==true){// Temporizador avisa que ya paso un segundoif(digitalRead(prog)==LOW){// El boton de programación esta activado?tiempo_boton++;// Incrementar el tiempo de controlflag_prog=true;// Avisar que el boton esta apretadoif(tiempo_boton==5&digitalRead(prog)==LOW){// Pasaron 5 segundos con el boton apretado?Programar_Tiempo();// Programa tiempo de funcionamiento de la bomba}}if(digitalRead(prog)){// El botón de programación se soltó?tiempo_boton=0;// Ignorar todos los pasos anteriores!!flag_prog=false;// Borrar bandera de programación.}segundos++;// Incrementa los segundosif(segundos==59){// La cuenta llego al minutos?segundos=0;// Borra segundos para nueva cuentaminutos++;// Incrementa los minutos wdt_reset();// Borra el contador del wachdog}if(minutos==tiempo_apagado&estado_bomba==false){// Se cumplió el tiempo de apagado?minutos=0;// Borrar minutos para nueva cuentadigitalWrite(relay_bomba,HIGH);// Activar la bomba de nutrientes (normal)//digitalWrite(relay_bomba, LOW); // Activar la bomba de nutrientes (invertido)estado_bomba=true;// Avisar que la bomba está funcionando lcd.setCursor(6,2);if(programando==false)lcd.print("SI");// Mostrar cartel del estado de la bombawdt_reset();// Borra el contador del wachdog}if(minutos==tiempo_funcionamiento&estado_bomba==true){// Se cumplió el tiempo de funcionamiento? minutos=0;// Borrar los minutos para nueva cuentadigitalWrite(relay_bomba,LOW);// Apagar la bomba de nutrientes (normal)//digitalWrite(relay_bomba, HIGH); // Apagar la bomba de nutrientes (invertido)estado_bomba=false;// Avisar que la bomba está apagadalcd.setCursor(6,2);if(programando==false)lcd.print("NO");// Mostrar cartel del estado de la bombawdt_reset();// Borra el contador del wachdog}wdt_reset();// Borra el contador del wachdogflag_bomba=false;// Borra bandera de INTE}}/******************* INTERRUPCION POR CADA SEGUNDO ********************** Ciclo de interrupción: 1 segundo***********************************************************************/ISR(TIMER1_COMPA_vect){flag_bomba=true;// Bandera para controlar los segundos}/****** MIDE LA TEMPERATURA DE LA SOLUCIÓN NUTRIENTE ********************* Sensor: DS18B20** Alarma Max/Min: 18 grados y 35 grados** Calefactor: SI por debajo de 16 grados NO por encima de 14 grados************************************************************************/voidTemperatura_Nutriente(){wdt_reset();// Borra el contador del wachdogsensor.requestTemperatures();temp=sensor.getTempCByIndex(0);dtostrf(temp,2,0,buffer);lcd.setCursor(5,1);lcd.print(buffer);lcd.print((char)223);wdt_reset();// Borra el contador del wachdog }/****** PROGRAMA EL TIEMPO DE FUNCIONAMIENTO DE LA BOMBA****************** Sensor: ** Tiempo Max/Min: 1 minutos y 50 minutos************************************************************************/voidProgramar_Tiempo(void){bytecontador=0;boolbandera=false;programando=true;digitalWrite(alarma_temperatura,LOW);// Apagar indicador de alarmadigitalWrite(relay_bomba,LOW);// Apagar la bomba de nutrientes (normal)//digitalWrite(relay_bomba, HIGH); // Apagar la bomba de nutrientes (invertido)lcd.clear();lcd.setCursor(0,0);lcd.print("TIEMPO DE ENCENDIDO");lcd.setCursor(0,1);lcd.print("Minutos:--");m1:if(digitalRead(prog)==LOW){wdt_reset();// Borra el contador del wachdogdelayMicroseconds(50);gotom1;}m2:if(digitalRead(prog)==HIGH){Potenciometro();wdt_reset();// Borra el contador del wachdoglcd.setCursor(8,1);lcd.print(buffer);gotom2;}if(digitalRead(prog)==LOW){tiempo_funcionamiento=M0;EEPROM.write(dir_ep,M0);// Salva el valor de funcionamiento en EEPROMwdt_reset();// Borra el contador del wachdog}m3:if(digitalRead(prog)==LOW){wdt_reset();// Borra el contador del wachdogdelayMicroseconds(50);gotom3;}lcd.setCursor(0,0);lcd.print("TIEMPO DE APAGADO");m4:if(digitalRead(prog)==LOW){wdt_reset();// Borra el contador del wachdogdelayMicroseconds(50);gotom4;}m5:if(digitalRead(prog)==HIGH){Potenciometro();wdt_reset();// Borra el contador del wachdoglcd.setCursor(8,1);lcd.print(buffer);gotom5;}if(digitalRead(prog)==LOW){tiempo_apagado=M0;EEPROM.write(dir_ep+1,M0);// Salva el valor de apagado en EEPROMwdt_reset();// Borra el contador del wachdog}m6:if(digitalRead(prog)==LOW){wdt_reset();// Borra el contador del wachdogdelayMicroseconds(50);gotom6;}Pantalla();programando=false;}/****** OBTIENE UN NÚMEROENTRE 1 Y 50 PARA CONFIGURAR LOS MINUTOS ******** Sensor: ** Tiempo Max/Min: 1 minutos y 50 minutos************************************************************************/voidPotenciometro(void){bytemuestras=0;unsignedintM1=0;do{M1+=analogRead(A0);// Lee el A/D y acumula el dato en M1muestras++;// Incrementa el contador de muestraswdt_reset();// Borra el contador del wachdog}while(muestras<=49);M0=M1/50;M0=map(M0,0,1023,1,50);// Escalar lectura para minutos de 1 a 50dtostrf(M0,2,0,buffer);// Preparar el dato para el LCDmuestras=0;M1=0;}/************* FUNCIÓN PARA MOSTRAR LOS TEXTOS EN PANTALLA*************** ***********************************************************************/voidPantalla(void){wdt_reset();// Borra el contador del wachdoglcd.clear();lcd.setCursor(0,1);lcd.print("Temp: ");lcd.setCursor(0,3);lcd.print("Activa: ");lcd.setCursor(7,3);lcd.print(tiempo_funcionamiento);lcd.setCursor(12,3);lcd.print("Apaga:");lcd.setCursor(18,3);lcd.print(tiempo_apagado);lcd.setCursor(0,2);lcd.print("Bomba:NO");lcd.setCursor(11,0);lcd.print("Ambiente");lcd.setCursor(10,1);lcd.print("Temp:");lcd.setCursor(10,2);lcd.print("Hum:");lcd.setCursor(0,0);lcd.print(" Solucion");lcd.setCursor(10,3);lcd.print("~");}/*********** FUNCIÓN PARA LEER LAS VARIABLES ATMOSFERICAS *************** ***********************************************************************/voidSensor_DHT22(void){t=dht.readTemperature();// Lee sensor temperaturah=dht.readHumidity();// Lee sensor humedadif(isnan(h)||isnan(t)){// Verifica si error de lecturalcd.setCursor(14,1);lcd.print("Error");lcd.setCursor(14,2);lcd.print("Error");}else{// No hay error, procesa los datosdtostrf(t,4,1,Temperatura);// Procesa la temperatura dtostrf(h,4,1,Humedad);// Procesa la humedadlcd.setCursor(15,1);lcd.print(Temperatura);// Muestra la temperaturalcd.print((char)223);lcd.setCursor(15,2);lcd.print(Humedad);// Muestra la humedadlcd.print("%");}}//*************** Fin del archivo Firtec Argentina ********************



 Si usted esta programando PIC, ATMEL, ARDUINO en lenguaje C sin duda es momento de investigar un poco sobre MicroPython.
Si usted esta programando PIC, ATMEL, ARDUINO en lenguaje C sin duda es momento de investigar un poco sobre MicroPython.